Grand Challenge
This project consisted
of
research into technology and
conceptual goals for unmanned
vehicles, with the objective of
producing a complete system that
would be semi-autonomous and
able to detect,
identify, monitor and report the
position of a number of specific
threats within an urban
environment.
 The
consortium comprised the
following organisations:
The
consortium comprised the
following organisations:
Silicon Valley Group
IDUS Consultancy Ltd
Kingston University
University of Reading
Smith Engineering (GB) Ltd
The Challenge:
To develop a robust autonomous
system that provides real-time
or near real-time intelligence
data against certain types of
threats in an urban environment
is a challenge in itself. To
have a system that has extremely
low visual and acoustic
signatures with resistance to
countermeasures is certainly a
grand challenge.
The ground-breaking
RoboHumatics© principles and
tuned image recognition software
being developed by the two
Universities in the consortium,
together with a novel solution
to detect IED command wires by
IDUS Consultancy, provides an
extremely sound base upon which
to develop the Silicon Valley
semi-autonomous portable threat
identification system (APHIDS).
The System
The Silicon Valley
APHIDS initiative is based upon
a user-optimised command/control
system that has the capability
to control multiple platforms
and sensor suites, both air and
ground based, as well as having
a modular interface potential to
process sensor data and output
with an effective HMI display.
The integration and processing
of electro-optical and audio
sensor data, together with
specialist targeted other data,
enables a high degree of
confidence to be established in
data capture and threat
assessment. The consortium does
not underestimate the challenge
of integrating a number of
emerging technologies, but
believes that the unique range
of skills amongst its members
bodes well in its endeavours to
produce a prototype APHIDS
system that will be functional
in summer 2008.
The Silicon Valley consortium
has incorporated a defined
exploitation strategy into the
programme with high hopes in
developing a number of related
and valuable products from this
interesting research
project.Richard May of IDUS
Consultancy explained the
deployment of the Moonbuggy
vehicles which act in tandem
with the UAV segment. The
Moonbuggies were developed by
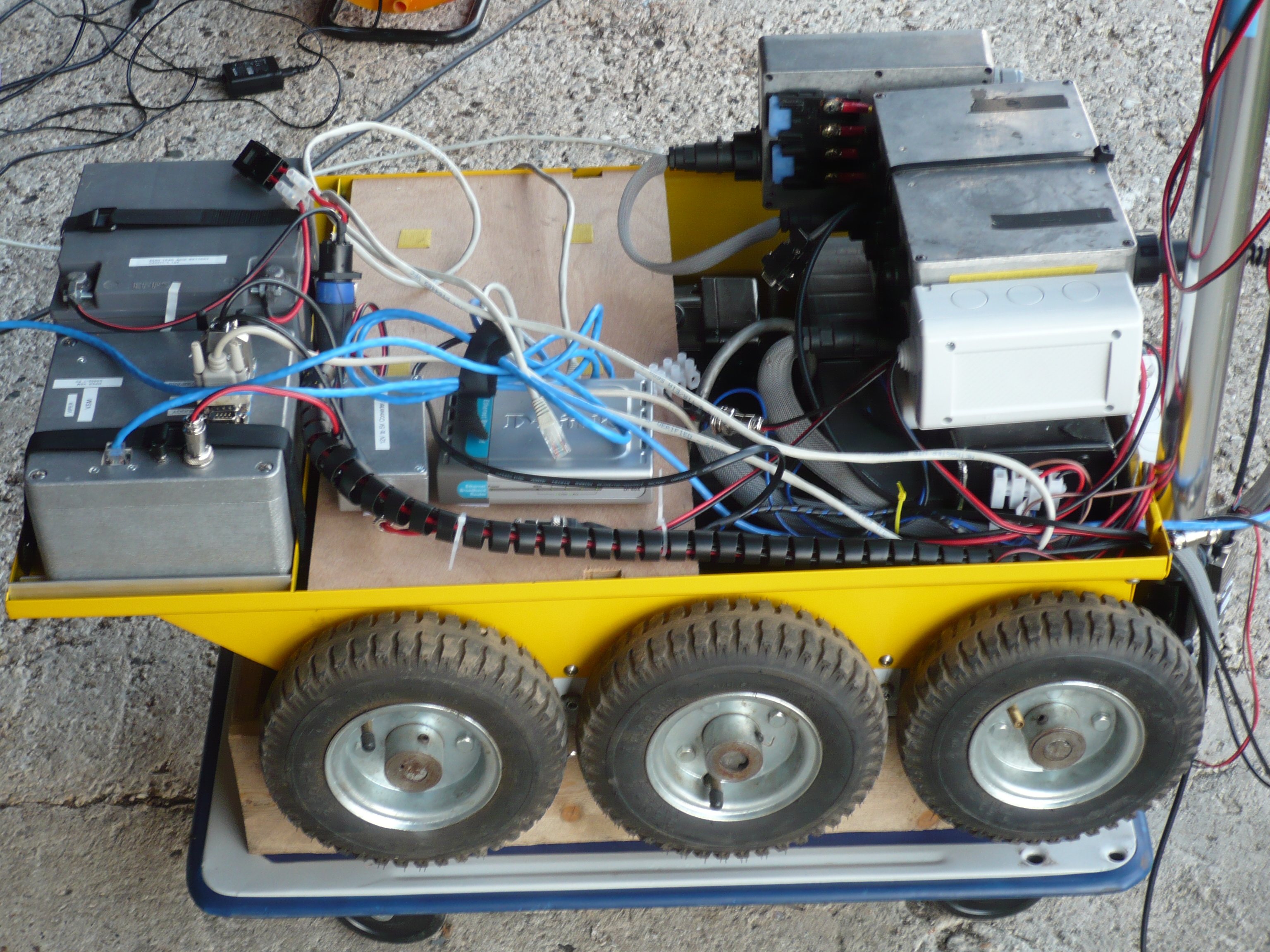
Smith Engineering.The
Diesel Moonbuggy unmanned ground
vehicle is designed as a heavy
payload sensor platform.
Able to be rapidly deployed by a
single operator the Moonbuggy
UGV is ideally suited for
emergency incident support,
large area survey and rapid
deployment.
The Moonbuggy EOD unmanned
ground vehicle (UGV) is designed
for rapid deployment and use in
dealing with EOD and IED
situations. The Moonbuggy UGV
can be used in any CBRN role
where remote inspection and
handling is requiredAble to be
transported using a standard off
road trailer the Moonbuggy EOD
robot can be deployed using a
single operator. With a top
speed of 12mph it can be quickly
deployed to a work area.The
Moonbuggy UGV has a modular
control system and easily
serviced diesel engine which
gives reliable field operation
without the need for specialist
support.
Sensors
The moonbuggy UGV can
carry a range of optional
sensors including radiation, gas
and biological. Readings from
the sensors are overlaid onto
the video output display.
Control options
433MHz RF 1km+
50m cable umbilical
1Km+ single use fiber optic
cartridge
Video transmission options
1.3GHz 1Km near line of sight RF
link
50m cable umbilical
1Km+ single use fiber optic
cartridge
Video system options
Thermal imager
Video system
A 4-camera system with
on screen display of vehicle
data. Wide angle navigation
cameras front and rear, Pan-tilt
zoom and arm camera. Each camera
can be viewed individually full
screen as part of a quad
display.
Power
The Moonbuggy Unmanned
Ground Vehicle (UGV) when
equipped with stretchers can
recover two casualties over
rough terrain. The Moonbuggy can
also carry radiation detector
and other environmental sensors.
The Moonbuggy UGV with its six
wheel drive and high
manoeuvrability can be used in
areas inaccessible to standard
vehicles.It can take up to 8
rescuers to recover two
casualties over rough terrain.
Using the Moonbuggy UGV the two
casualties can be recovered
using only two rescuers offering
reduced risk to personnel. It
can also be used to monitor the
incident and provide live video
feed to a command post and
medical personnel.